Projects
> Mobile Autonomous Systems
What is MASLAB?
MASLAB, or Mobile Autonomous Systems LABoratory, is a month-long intensive class held during MIT's Independent Activities Period (IAP), where teams of 3-5 build an autonomous robot for competition.
The Challenge
This year's challenge involved scoring red and green cylinders into specified goals. Cylinders can be collected from the floor or off of dispensers. To score points, cylinders can either be pushed into designated goal areas, or placed onto pegs. Each round lasts 250 seconds. Points scored can vary depending on where the cylinders were collected from, as well as which goals they were scored into.
For more information about this year's competition, check out the game manual.
Our Strategy
Our team decided to prioritize maximizing the number of points scorable. Because cylinders that are gathered off of the floor and placed onto the correct colored pegs can score the most number of points per round, we designed our robot with those constraints in mind.
Our final design consisted of a conveyer belt intake that sucks cylinders off of the floor into the robot, a inner-sorting pipeline that sorts the cylinders by color, and a simple outtake motor that can output 5 cylinders at once onto the correct pegs. Executing parallel to the intake-sorting system runs a global planning algorithm for the robot to locate and drive towards cylinders.
Our team documented our daily progress through the MASLAB Team Wiki page.
To read more about our experiences in detail, check out our team wiki.
To see the code used to control our robot, check out our GitHub.
Huge thank you to my teammates Erina Yamaguchi, Alisha Fong, Adrian Silva, and Chenkai Mao :)
Design Process
Here are more images from our design and build process!
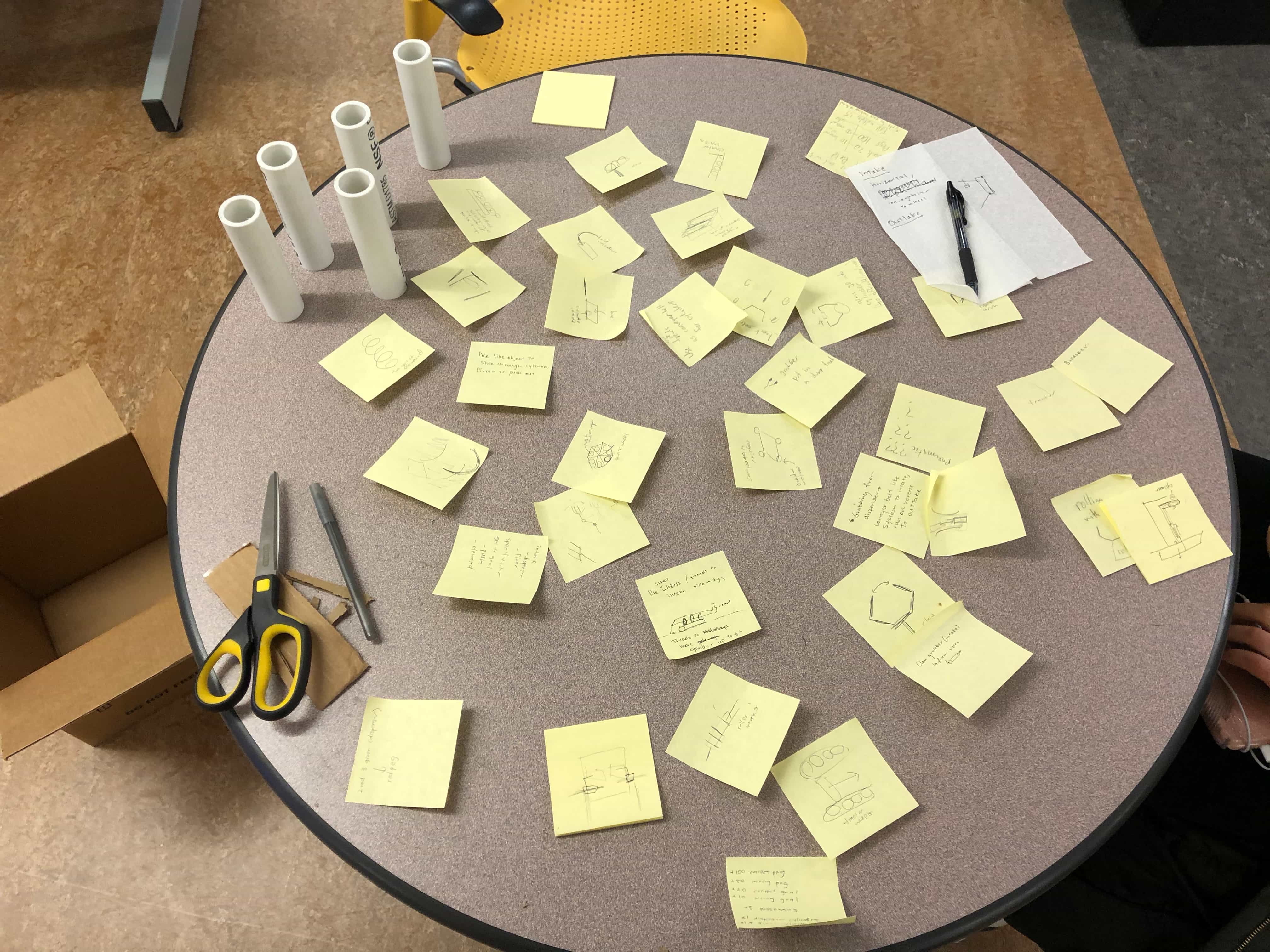
On the first day, we used post-it notes to communicate design ideas.
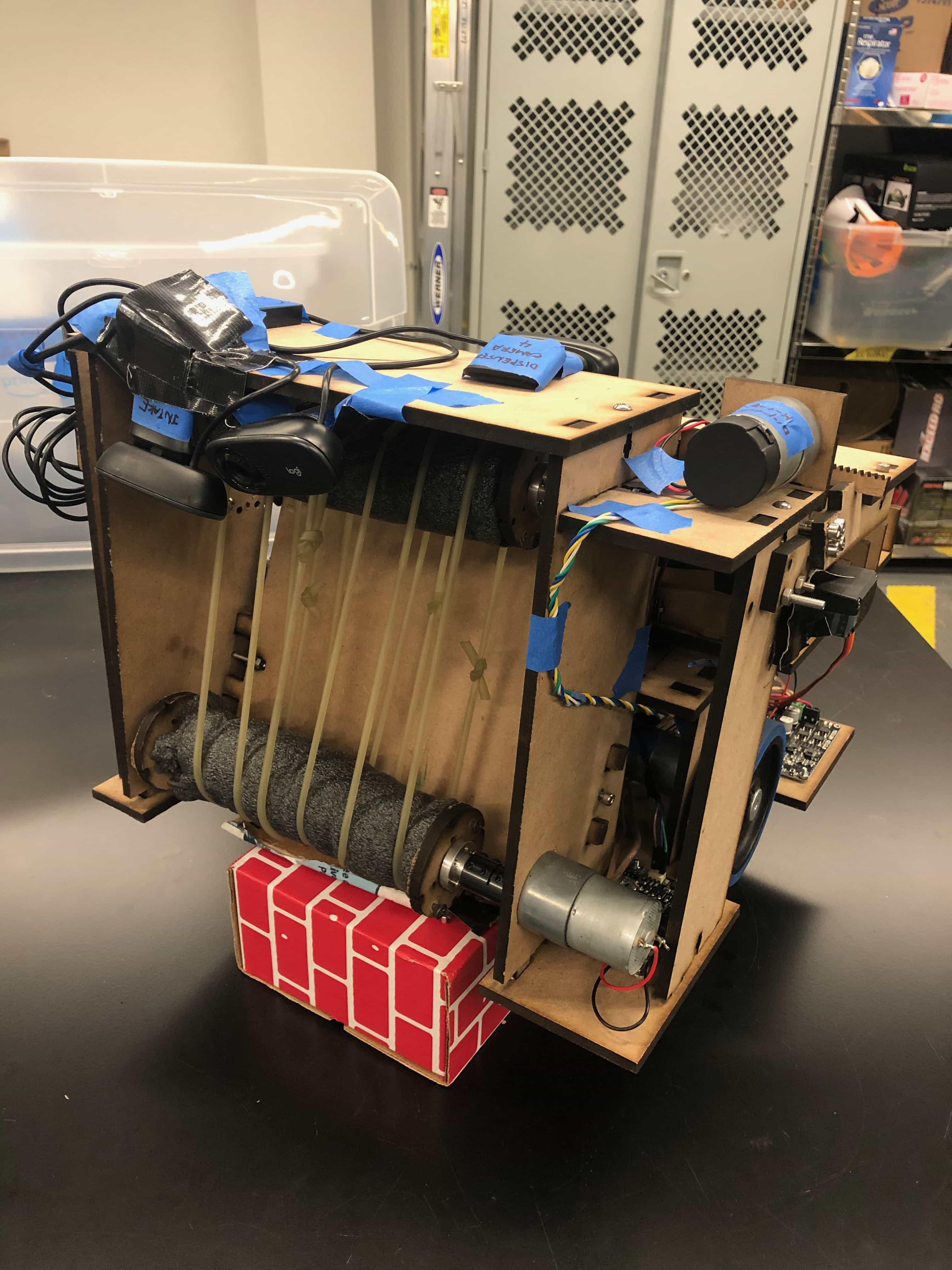
Front of the robot
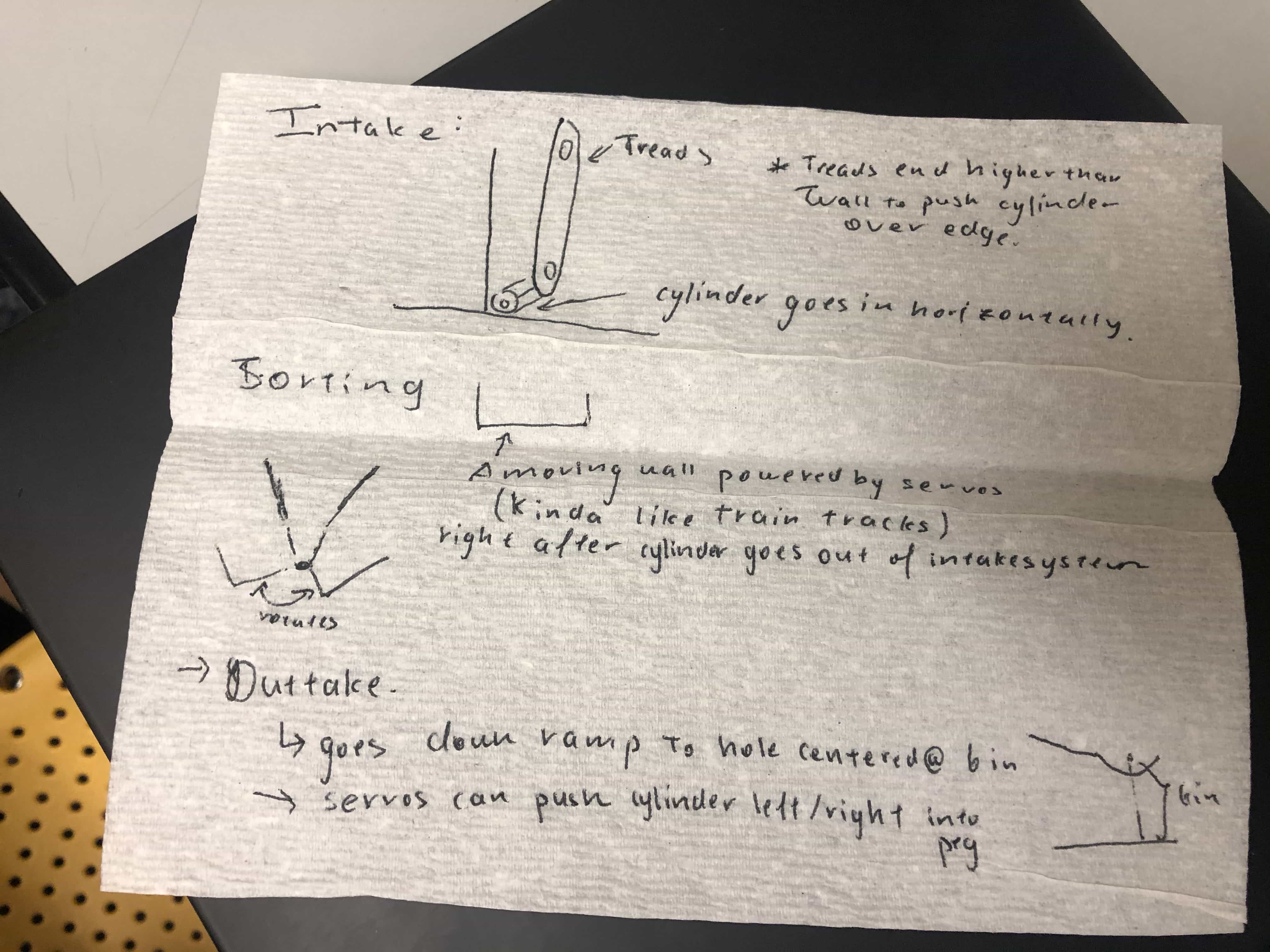
Spontaneous design ideas were often written out on paper towels when we couldn't find paper.
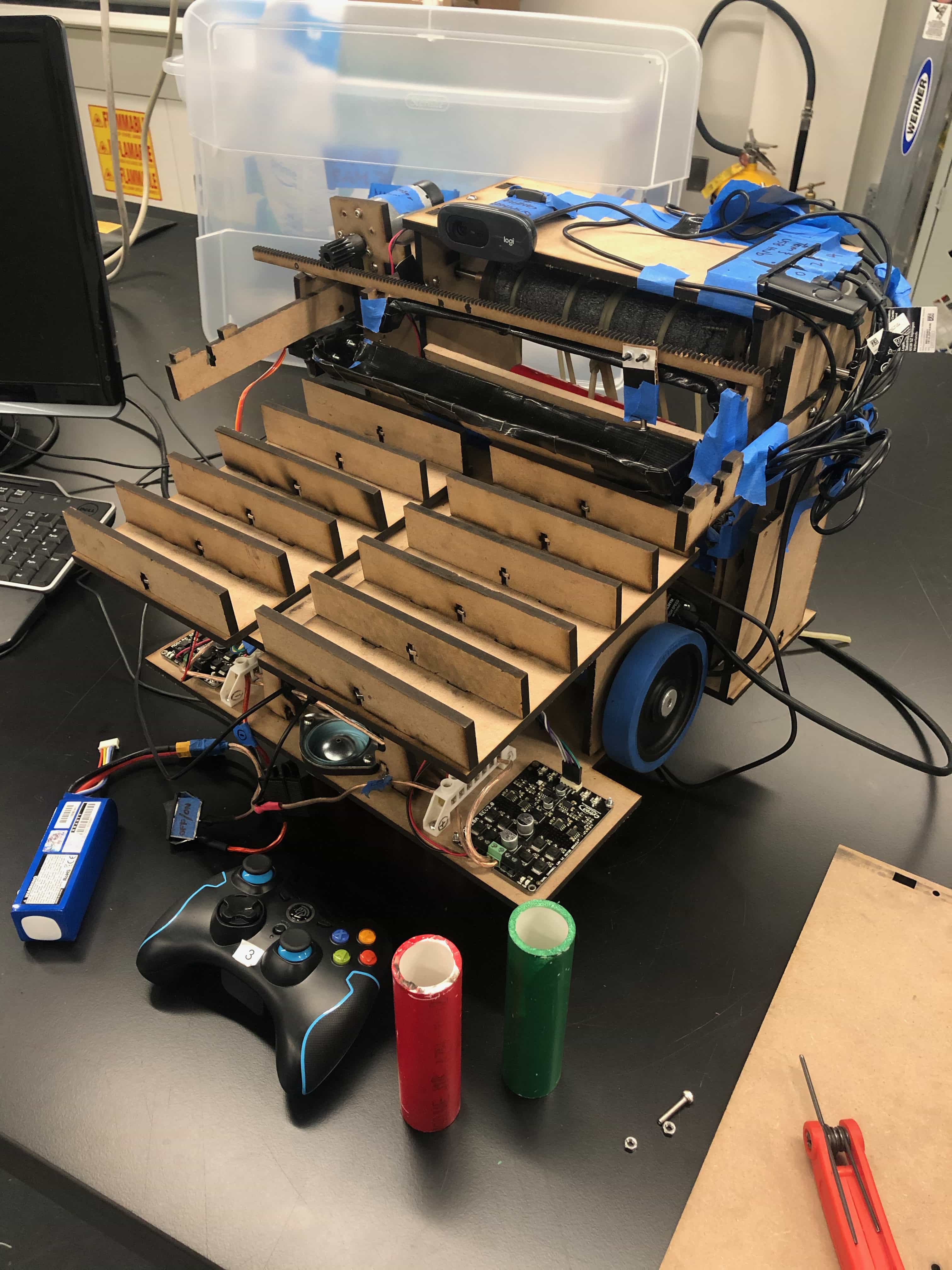
Back of the robot

Prototyping the intake, sorting, and sorting system with cardboard.
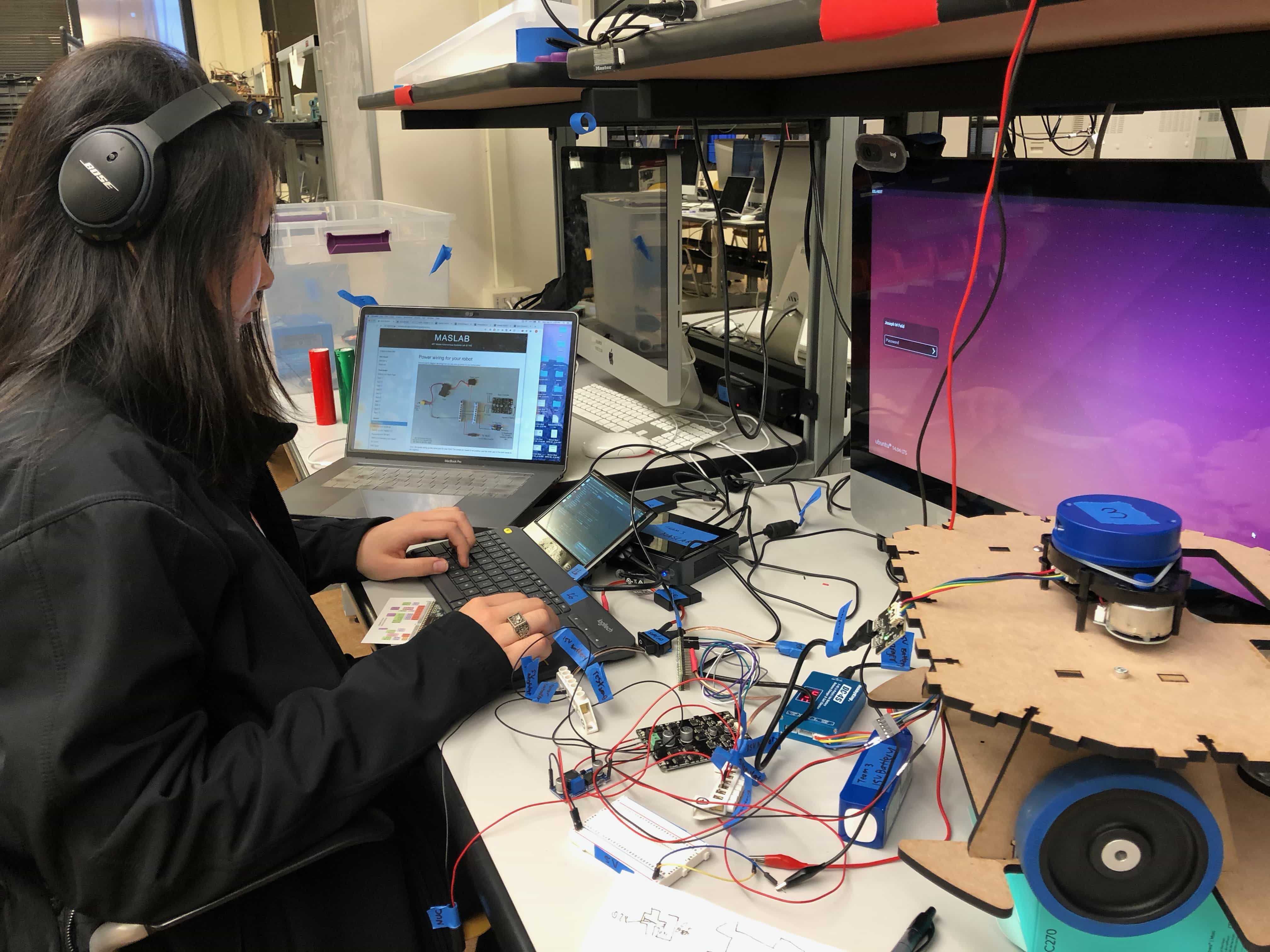
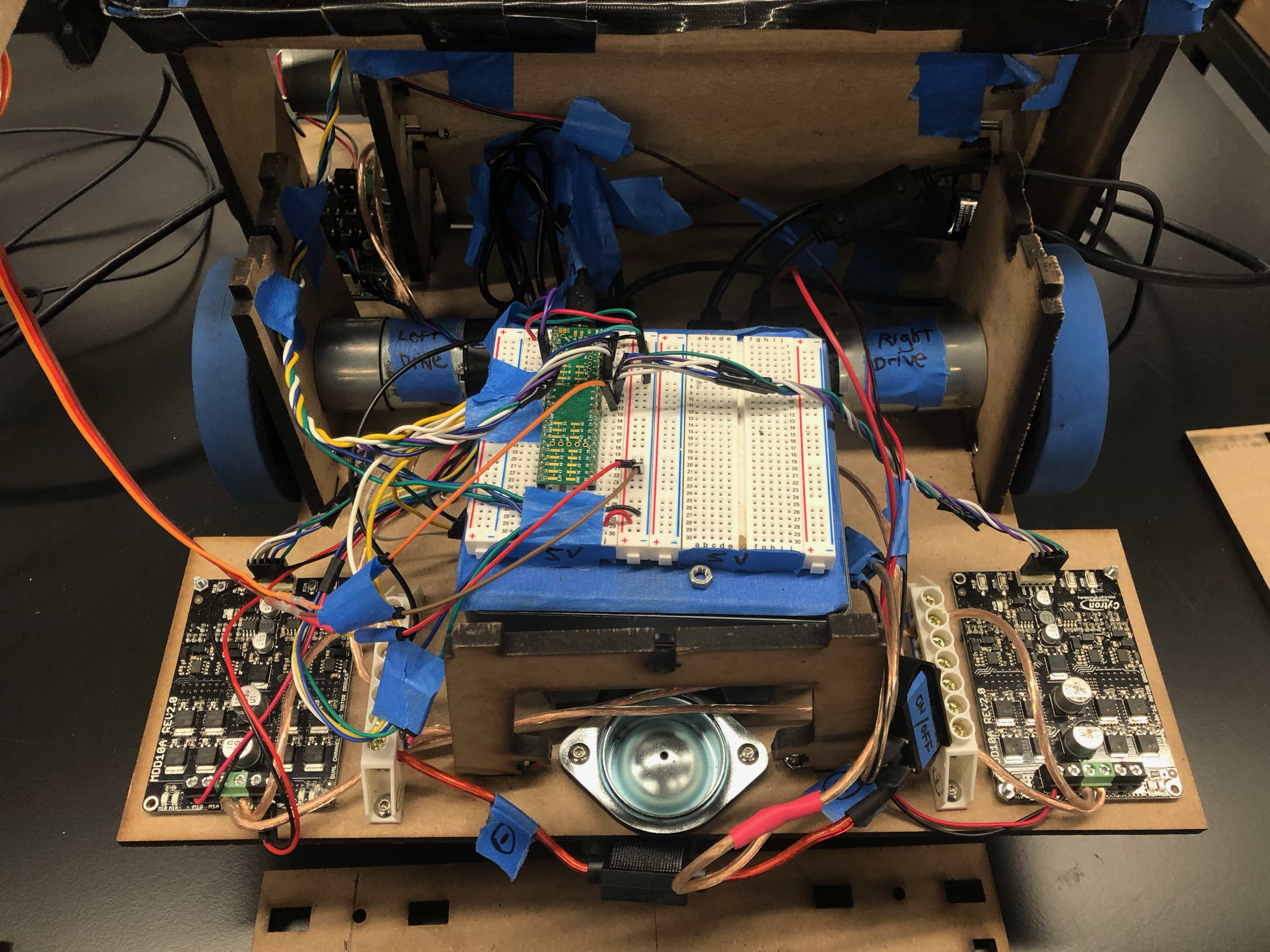
Building the kitbot and testing out the electronics.
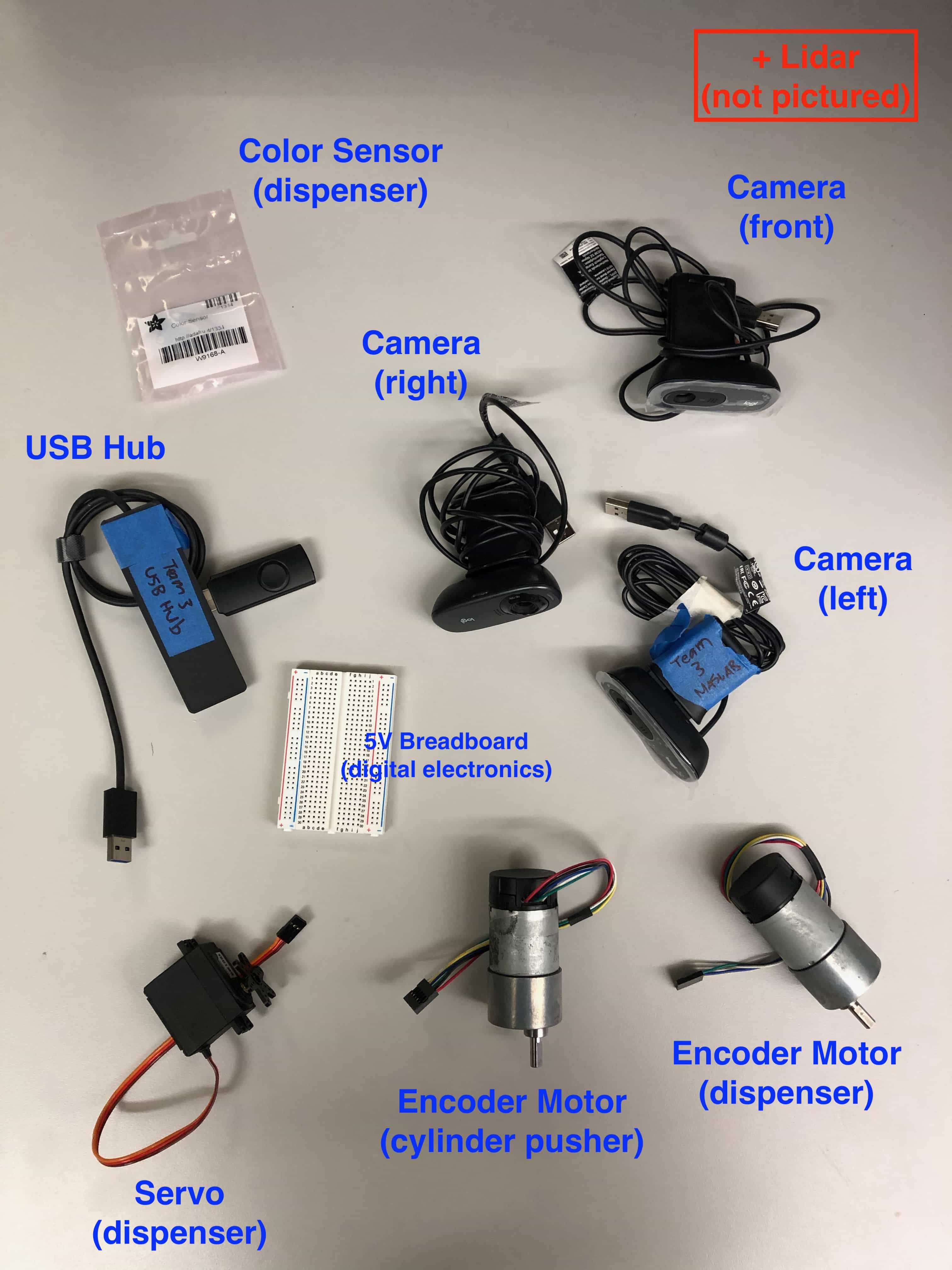
Electronics used in our robot
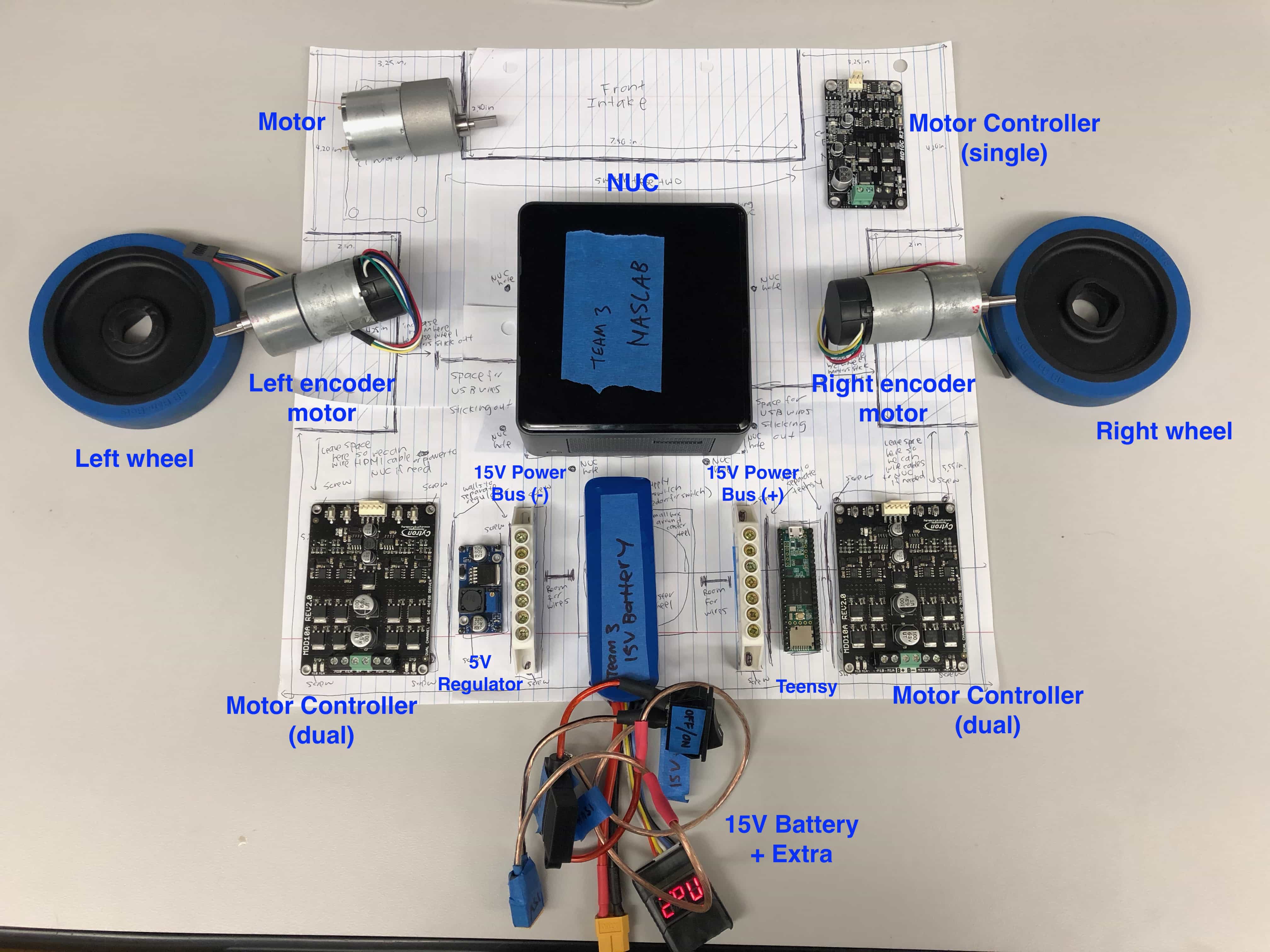
Mounting diagram of the robot base, created for our MechE as reference to CAD with (thanks Erina!). We wanted to make sure that the robot was designed with electronics placement in mind.
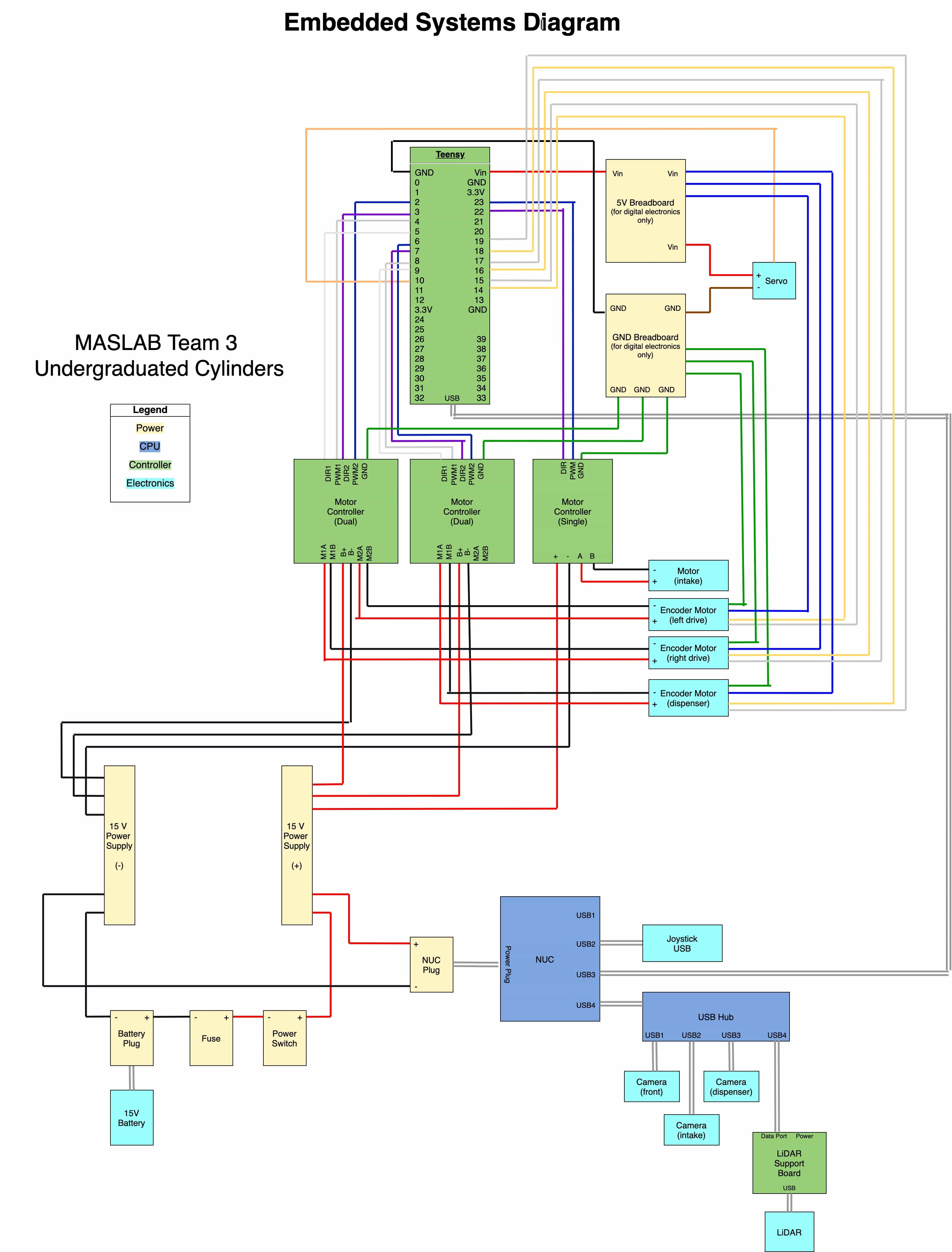
The robot's final embedded systems / wiring diagram

Our robot on the field for the final competition!
Integrated Electronics